几何表达及其相互转换#
主要介绍三种常见的三维数据表达方式,以及它们之间的部分相互转换方法。
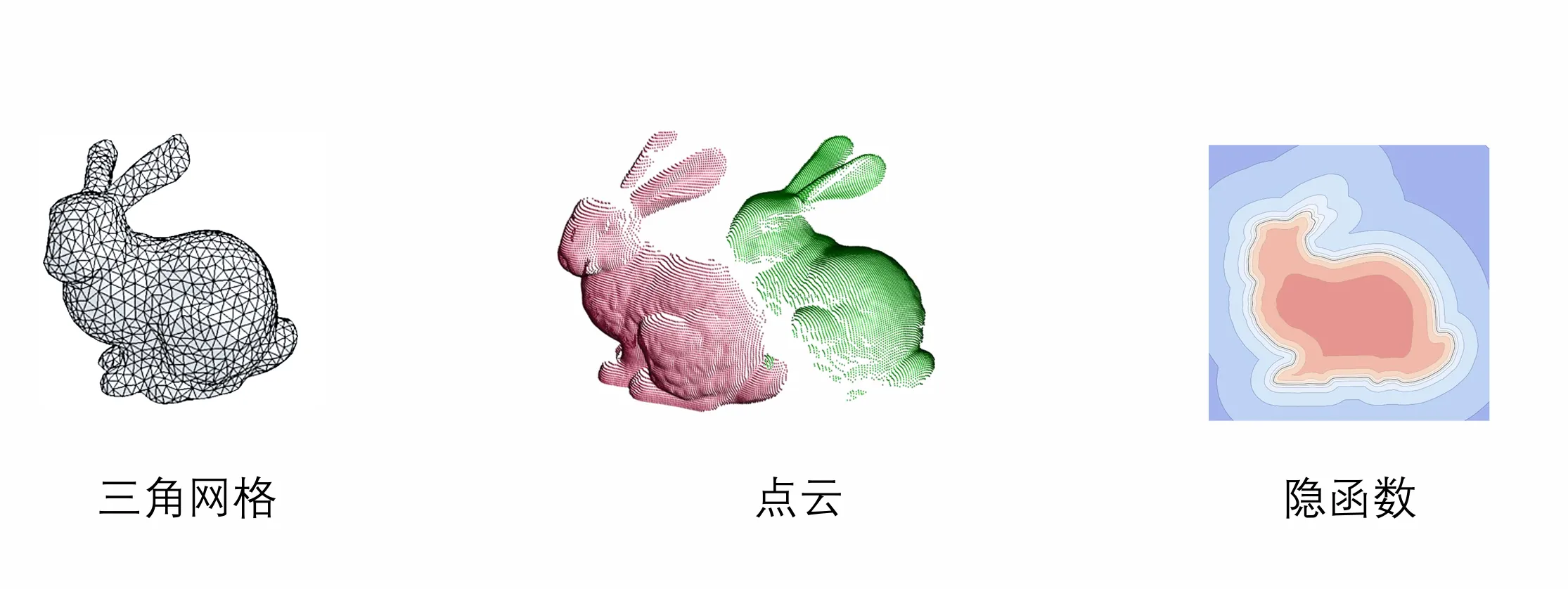
三角网格#
- 基本表达:由顶点(包含 坐标)和三角形(包含顶点的索引 )组成。
- 法向量计算:面法向量通过三角形两边的向量叉乘得到;点法向量则是由相邻面法向量按面积加权平均求得。三角形内部任意一点的法向量可以通过重心坐标插值求出。
- 数据结构:为了快速查询任意顶点的邻域,通常使用以边为中介的半边数据结构。
- 几何变换:
- 刚体变换(Rigid):包含平移和旋转,保持长度不变。
- 相似变换(Conformal):包含平移、旋转和等比例缩放,保持角度不变。
- 仿射变换(Affine):包含平移、旋转、缩放、对称和错切,保持共线关系。
- 法向量的变换:经过矩阵 变换后,新法向量的计算公式需要用到逆转置矩阵:。
点云#
- 基本表达:最基础的表达是 xyz 格式的顶点列表。这通常是三维扫描仪的直接输出格式。
- 法向量估计:可以从点云的局部利用主成分分析(PCA)进行估计。通过计算协方差矩阵,其最小特征值对应的特征向量即为法向量。
隐函数#
- 基本表达:用函数的等值面(如 )来表达一个三维形状。例如符号距离场(SDF)。
- 法向量计算:隐函数 的法向量即为该函数的梯度方向:。
- 布尔运算 (CSG):隐函数非常便于进行布尔运算,如并集 、交集 和差集 。
三维表达之间的转换#
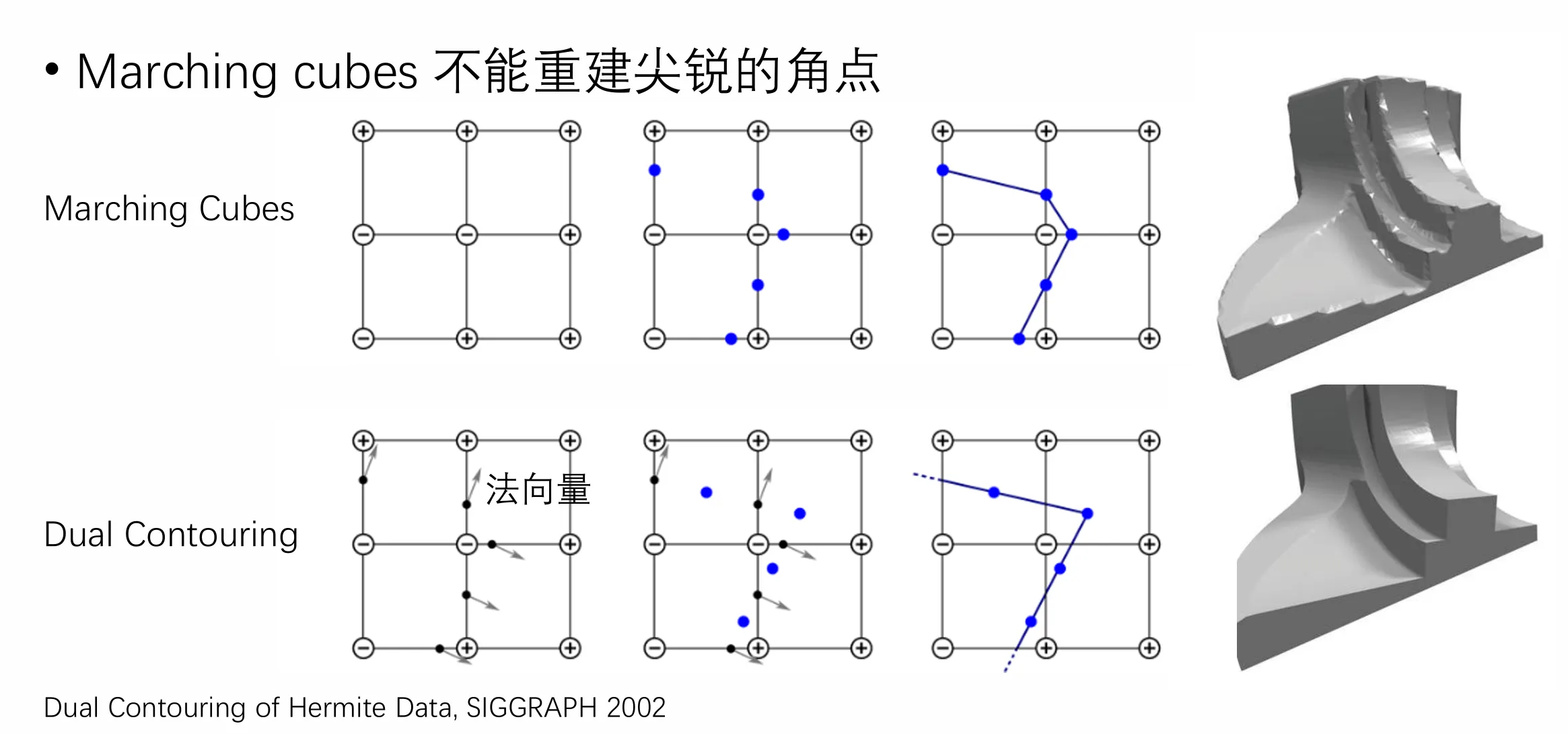
- 隐函数转三角形网格:常用 Marching Cubes 算法,该算法对三维空间均匀采样并通过查表得到三角化结果,但它的缺点是不能重建尖锐的角点。改进方法有 Dual Contouring。
- 三角形网格转隐函数:通过计算空间点到三角形的最短距离来获取隐函数值。可以通过射线与三角形网格交点的奇偶性来判断点是在网格内部(奇数交点)还是外部(偶数交点)。
曲面重建#
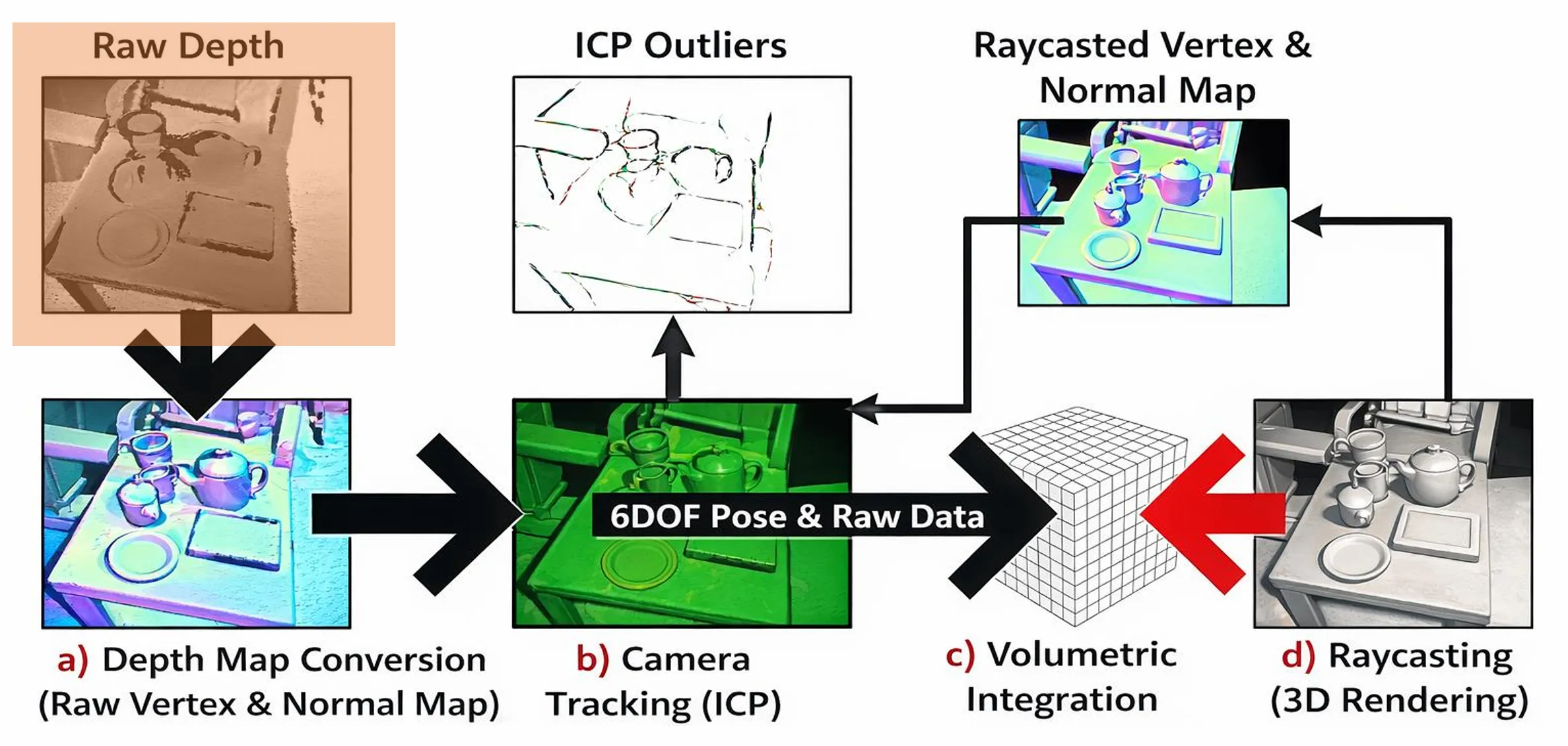
以 KinectFusion 为例子,探讨了如何从深度传感器的数据重建出三维模型。
三维扫描技术原理#
- Kinect V1:主要利用结构光(Structured Light)原理,硬件包含红外投影器、RGB 相机和红外相机。
- Kinect V2:利用飞行时间(Time Of Flight, TOF)原理,通过测量光的传播时间来计算距离,反映在信号上即为相位的变化。
从深度图到三维数据#
- 深度图转点云:利用相机的内参数矩阵(Camera Intrinsics,包含焦距和主点坐标),通过投影变换的逆过程将深度图的像素点转换到世界坐标系下。
- 获取法向量:通过建立邻域关系先构建三角形网格,进而为每个三角形计算法向量。
点云配准与 ICP 算法#
-
配准目标:给定两组存在对应关系的点云 和 ,求解出一个旋转矩阵 和平移向量 ,使得误差 最小。
-
平移的求解:最优的平移向量可以通过两组点云的加权质心求得,即 。
-
旋转的求解:将上述求得的 带入,下面目标是最小化两组点云旋转后的加权欧氏距离平方和,其数学表达为:
约束条件:
这个优化问题在数学上被称为 Orthogonal Procrustes problem ↗。
求解方法:奇异值分解 (SVD)
- 计算协方差矩阵 利用中心化后的两组点云矩阵 和 ,以及权重矩阵 ,计算它们之间的交叉协方差矩阵 : 紧接着,对矩阵 进行奇异值分解:
- 构造旋转矩阵 利用 SVD 分解得到的正交矩阵 和 ,可以求得最优旋转矩阵 :
-
迭代最近点 (ICP) 算法:
- 由于一开始不知道点云的对应关系,ICP 采用迭代的方法:1. 查询最近点建立对应关系;2. 根据对应关系求解当前的旋转 和平移 ,不断循环直到收敛。
- 算法改进:
-
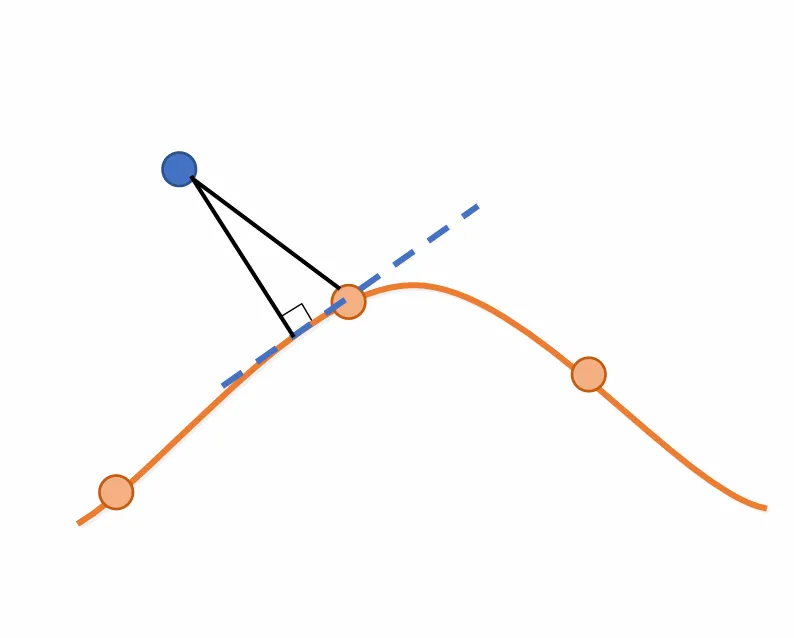
改进一:考虑法向量
公式:优化目标从“点到点的斜线距离”变成了“点到切平面的垂直距离”。
-
改进二:剔除错误匹配点
-
TSDF (截断符号距离场)#
如果直接对三维空间每个点,都计算到曲面的距离,开销太大,难以做到实时,但我们一般只关注到曲面距离在 附近的,下面介绍更高效的方法。
TSDF 是一种隐式表达三维表面的方法。它将三维空间划分为均匀的网格(体素),每个体素存储着该点到最近表面的距离(SDF)以及置信度权重。
-
单帧点云 TSDF (初始化)
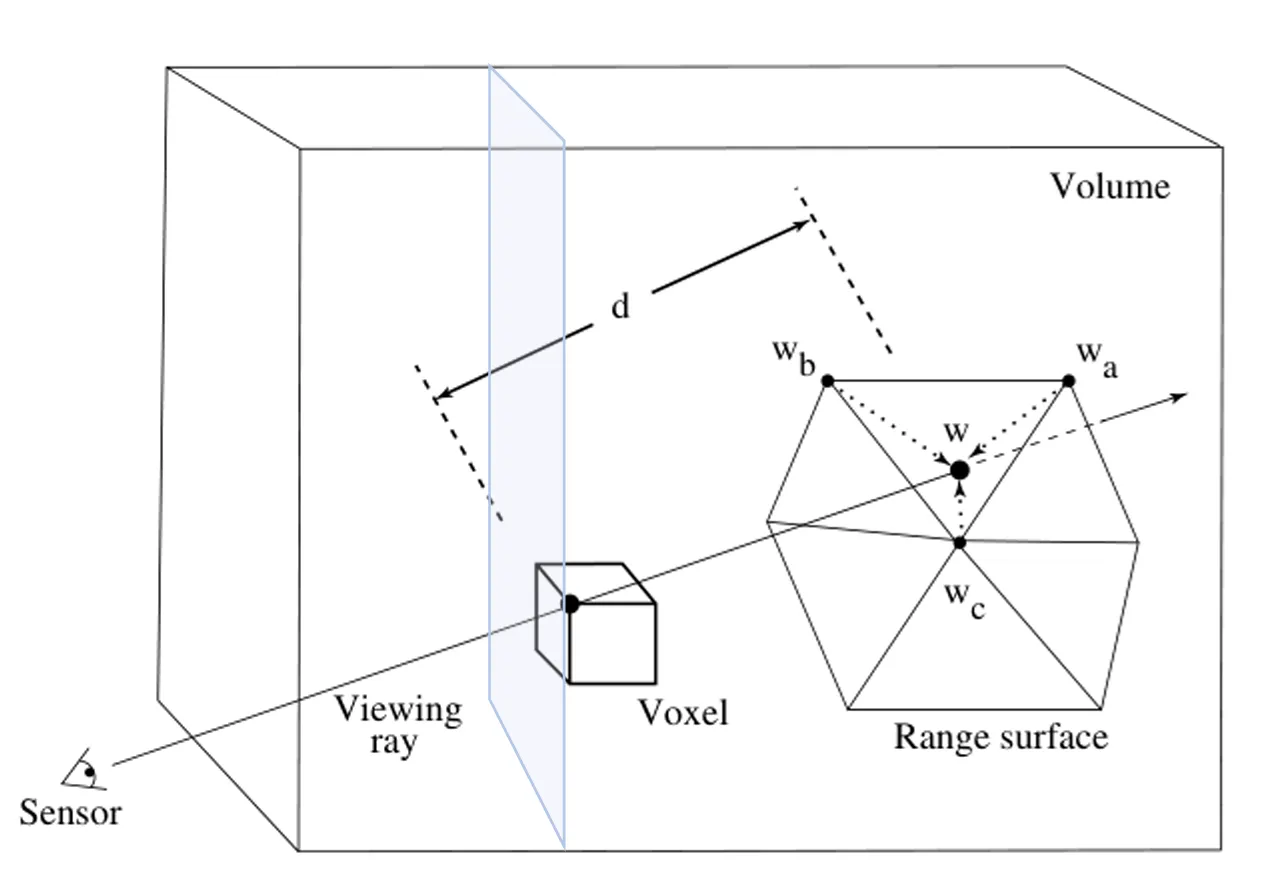
在拿到单帧深度图/点云后,需要将其转化为 TSDF 空间:- TSDF 距离值 :
- 从相机传感器发出一条穿过当前体素 的射线,打到观测到的表面(三角网格)上。
- 计算体素到表面的距离。为了抵御远处的噪声,引入**截断(Truncation)**机制:只在表面附近的一个规定阈值范围内保留真实的距离值,超出这个范围的距离会被截断为一个常数。
- 置信度权重 :
- 表示该体素距离值的可靠程度。
- 靠近表面的区域,权重通过在三角形上插值计算得出;而在被截断的部分(即远离曲面的区域),其 SDF 是不可信的,因此截断部分的置信度设为 0。
- 计算优化:由于每个体素的计算是相互独立的,因此三维体素可以进行分层并行计算(适合 GPU 加速)。
- TSDF 距离值 :
-
多帧 TSDF 融合 (Integration)
在相机的连续运动中,我们会得到多帧不同的 TSDF 数据。我们需要将新的一帧 融合到已有的全局模型 中。- 融合策略:加权平均
- 通过加权平均不断更新全局体素的距离值 和权重 。这种方式能极其有效地平滑掉单帧深度图带来的传感器噪声。
- 更新公式:
- 距离更新:
- 权重累加:
- 零交叉点 (Zero-crossing):在加权平均的过程中,物体表面的实际位置(即 SDF 从正变负的 的等值面)会被不断修正,最终逼近真实的物理表面。
- 融合策略:加权平均
-
TSDF 用于形状补全 (Shape Completion)
在真实扫描中,由于视角的限制,物体总会有被遮挡的背面或死角(形成孔洞)。TSDF 的空间划分特性可以天然地辅助进行孔洞修补。 -
可视化
在扫描过程中,可以实时用 Ray Casting 进行三维渲染。
函数拟合#
-
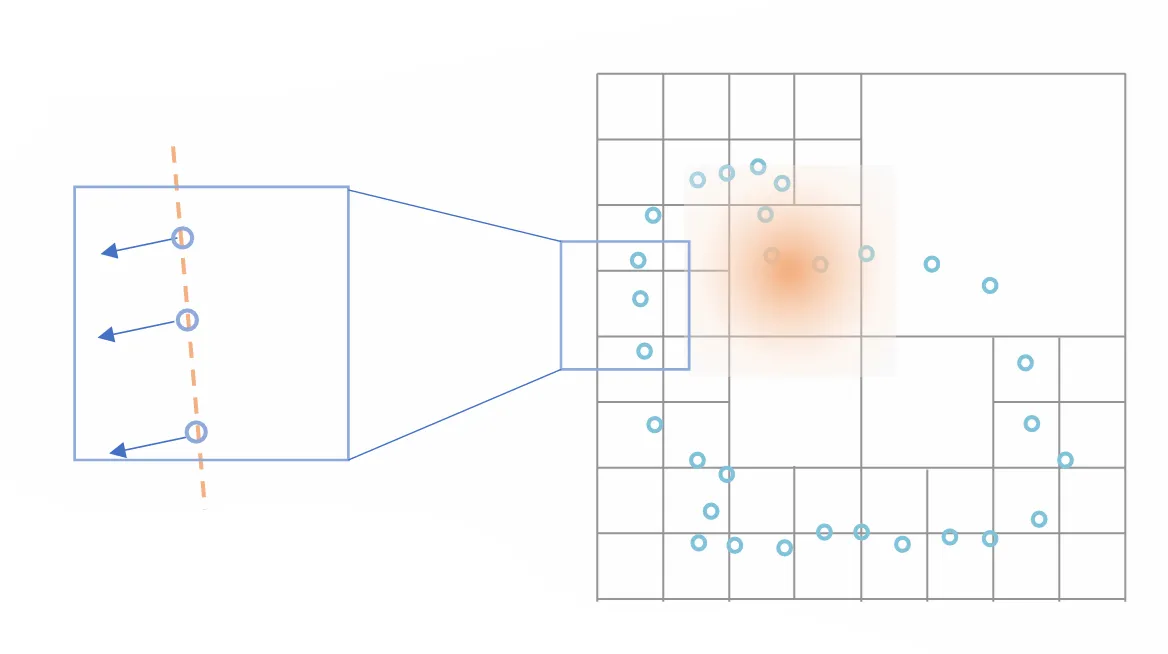
局部拟合
首先使用空间划分数据结构(如四叉树/八叉树),将整体大空间切割成众多局部网格。在每一个局部网格内,点云的分布相对简单,可以使用基础的数学函数进行拟合。最小二乘局部拟合(以二维为例) 最简单的局部表面可以假设为一条直线或一个平面(一次函数):
为了找到最贴合当前局部点云的平面,使用最小二乘法求解以下目标函数:
要求拟合平面的法向量 尽可能与已知数据点的法向量保持一致。 是用于平衡这两种约束的权重参数。
如果局部形状略微弯曲,一次函数可能不够精确,此时也可以使用二次函数来捕获更好的局部细节:
各个局部网格独立完成拟合后,如果直接拼在一起,边界处会产生不连续的断层或棱角。为了实现无缝拼接,引入了 Partition of Unity (PoU) 原理。
算法为每个局部拟合函数 分配一个平滑的权重函数 。规则通常是:越靠近该局部区域的中心,权重越接近1;越靠近网格边缘,权重平滑递减至0。
空间中任意一点的最终整体形状 ,由覆盖该点的所有局部拟合函数“加权平均”共同决定:
-
全局拟合:Poisson 重建
首先需要明确两个关键的数学函数:- 向量场 :
- 映射关系:
- 物理意义: 由输入点云的法向量推导计算出来的空间梯度场。
- 指示函数 (Indicator Function):
- 映射关系:
- 物理意义: 这是一个用来区分“模型内部”和“模型外部”的标量函数。通常定义模型内部为 0,外部为 1。
由于输入数据只有点云和法向量,我们实际上只知道表面的“梯度”(即法向量场 )。我们需要根据这个梯度场反推出整个空间的指示函数 。
-
目标能量函数 (Energy Function): 为了找到最符合已知法向量的表面,我们需要寻找一个指示函数 ,使得它的梯度 尽可能逼近已知的向量场 。这转化为一个最小二乘极值问题:
-
转化为泊松方程 (Poisson Equation): 直接求解上述积分函数的最小值比较困难。根据变分法中的 Euler-Lagrange 公式,能量函数 取得最小值时,必然满足以下偏微分方程:
(注: 是拉普拉斯算子, 是散度算子。即要求未知函数 的拉普拉斯值等于已知向量场 的散度。)
- 向量场 :